The Problem
The goal of the robot motion planning problem is to design autonomous
robots that you can tell where to go, without telling it how to go there.
The robot should have sufficient information to decide how to reach its
destination. Therefore, our problem has to be confined to a certain environment,
because the robot cannot possibly store information about any place in
the world.
We
will make a few simplifying assumptions to help us solve this problem.
We are hoping that our assumptions are not over-simplified as to lose touch
with real world situations. These assumptions are:
-
2-dimensional environment Our environment will be a planar region,
ie, one that can be represented by a floor plan. This will mean that if
the robot moves around according to this floor plan, it will not be obstructed
by something that protrudes into the air.
-
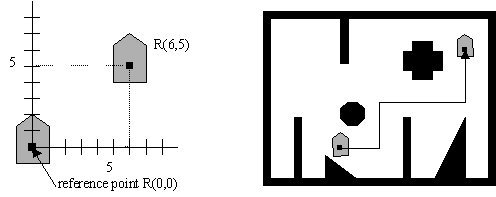
convex polygonal robot This assumption is not crucial, but will
simplify our picturing of the problem. A non-convex polygon can be made
into a convex polygon. Suppose that our 2D environment is the Cartesian
coordinates, there is a reference point R(x, y) inside or on the convex
polygon robot that indicates its location.
-
point robot It is even more useful to assume the robot to be a point,
as we will see later. Our discussion will focus on point robots.
-
static environment There are no people walking in the way of our robot
-
obstacles are open sets The robot is allowed to touch them.
-
translation robot Our robot is not capable of rotating.
previous
next