In order to aid our discussion, we will first give a few definitions:
Although our discussion is focused on point robots, it is useful to
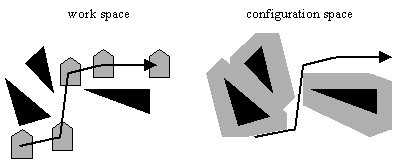
understand how polygonal robots spell out the difference between work space
and configuration space. Suppose that we have a point robot, then this
point can move freely in our free space without intersecting with our obstacles.
For a polygonal robot, if its reference point trespass certain points in
the space, the robot will intersect with one of the obstacles. These
points are in the shaded area in the figure above, and are relative the
reference point of the robot. The configuration space is the free space
without these gray areas. The work space include these gray areas, and
is the space that the polygonal robot will reach by moving around. In most
cases, we make the natural assumption that the point robot is the reference
point of a polygonal robot.