![]() Lab #2
Lab #2
Introduction to the Robolab environment.
© D. Weinberger and
D. Thiébaut

SSSP Lab Lab #2
Plan
Pilot 1
-
You should have one of the Pathfinder robots (1 or 2) done
at this point. If not, just locate Pathfinder 1 in the
Constructopedia booklet and implement it.
- Start the Robolab software
- Select the Programmer Option
- Double click on "Pilot 1"
- Set Motor A in --> direction
- Keep the wait-time at 4 seconds
- Download the program to the RCX
- Run the program and see what happens.
- Explain the behavior of the robot. (keep good notes that you will include in your Web report tonight.)
- Back with the Pilot 1 program, change the direction of the rotation of Motor A.
- Keep the wait-time at 4 seconds.
- Download the program and test it. How is the behavior different now?
- Lift the connector linking the motor to the RCX from Port A.
- Rotate it by 90 degrees, and connect it back.
- Run the program again.
- Perform this rotation of the connector a few times and observe the behavior of the Pathfinder. How does the connection affect the rotation of the motor?
- Modify the program and choose different wait times.
- Download each variation of the program in the RCX and test each one out.
Follow these steps:
Next:
Obersving the influence of the connectors:
| EXERCISE: Think of a way to use the Pilot 1 program and make both motors turn. Think carefully, this is a tricky problem! |
| EXERCISE: Figure out a way to make the robot go straight. |
Last experiments with the Pilot 1 program:
Part II: Pilot 2
- Use two motors, going in the same direction, both with power set to 1.
- Use a 2-second wait time.
- Download the program and test it out.
- Set Motor A to Power 1, and Motor C to Power 3.
- Download and test the program. What do you observe?
- Set the motors to turn in the opposite direction of their previous settings.
- Download and test the new program. Do you observe the same
curving of the robot?
- Replace the Wait-tile by the touch sensor with the arrow facing in. This means that the program will wait at that tile until the touch sensor is pressed (i.e. until it hits an obstacle).
- Download the new program and test it by holding the robot in your hands, wheels going freely in the air. Then use your fingers to activate/deactivate the touch sensor.
- Record your observations.
- Replace the touch sensor with the arrow going in with the touch sensor with the arrow going out.
- Test the new program out.
Go back to the window that shows the menu of the Pilot programs, and double-click on Pilot 2.
Part III: Pilot 3
- Go back to the main menu and double-click on Pilot 3.
- Set Motor A to Power 3, Motor C to Power 3, followed by a wait of 2 seconds. Set the second set of motor tiles to Power 5 for A, Power 3 for C, followed by a final wait tile of 1 second.
- Download the program and try it out.
- Change the "one run" tile to a "continous loop" tile.
- Download and test the new program.
| EXERCISE: Modify the program so that your pathfinder robot goes around the floor following a square path. |
| EXERCISE: Modify your solution program for the last exercise so that your robot goes in a square path in the opposite direction. |
| OPTIONAL EXERCISE: Move to the hallway. Using masking tape, mark the borders of a square on the floor containing 4 tiles (2 tiles by 2 tiles). Using additional masking tape, mark a larger square containing the smaller one, and such that the larger square contains 9 tiles (3 tiles by 3 tiles). Tune your program so that your Pathfinder robot will go around the small masking-taped square and inside the large masking-taped square without ever going over the tape. |
Part IV: Pilot 4
-
Go back to the main menu and double-click on Pilot 4.
This time the program consists of two steps. You can move from
one step to the next by using the red arrows on each side of the
program box. You can also add or remove steps (blocks of 4 tiles)
by clickin on the plus and minus boxes. Do not hesitate to refer to
the Robolab brochure for additional information as you are
doing this part of the lab.
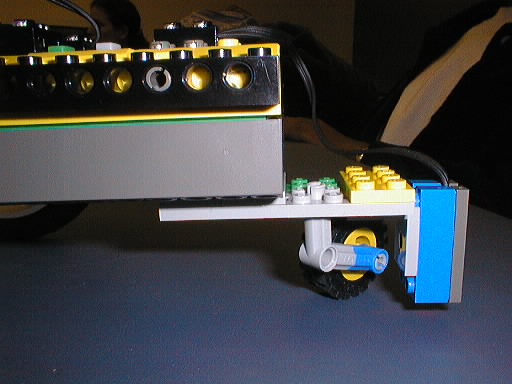
- First, modify your Pathfinder robot so that it has a light
sensor connected to it. Make the light sensor "look" down,
about a quarter inch off the ground. The photo
below shows one possible implementation.
- In the first step of the program, set Motors A and C to Power 3, and set the light sensor values to less (<) than 50. In the second step make the motors stop, and finish with wait tile for a random time less than one second.
- Download your program. Use the folded cardboard sheet that has
an oval back track drawn on it, and put your pathfinder in the middle
of the oval. Start the Pathfinder. What do you observe? What is the
function of the light sensor tile set to "< 50"?
- Modify the program so that the light sensor settings are "> 50.
Test your program and figure out what the funcion of the tile is
with the new setting.
| EXERCISE: Make your Pathfinder start in the middle of the black oval, go straight until it finds the black line, stop at the black line, and reverse direction while turning. Make this last phase of going backward last a second or two only. |
| EXERCISE: Modify your previous program so that the Pathfinder keeps on going around, going straight until it finds the black line, backing up while turning every time it encounters the black line, and then resuming going straight. |
Web Page Report
-
Create a Web Page relating what you did today.
Your page should be called lab2.htm. You should be using all the
features
we covered today.
Here is a way to start it: